Hold Me When I’m Dying — Early Exploration in Holding and Listening


I decided to start the exploration of the cloud-shell concept through multiple thought exercises that help me to develop many small aha! moments that will later come together and act as an unified concept. Or at least that's the plan. This post is a snapshot of that ongoing process and my journey so far. Currently it resembles a map with multiple paths on it.
The current stage of my work involves conceptual exploration instead of focusing on developing any physical objects. Before I start any sketching, I need to understand the essence of the cloud-shell and how I want it to behave. I need to understand the sensibilities that the cloud-shell will represent.
The two main questions I need to answer are how much presence can be achieved without being disruptive or intrusive, and how will the shell material behave when my goal is to create an experience of a quiet and subtle end-of-life companionship instead of interactive engagement in a traditional sense.
I've been also working on looking for the approaches which feel essential to the shell, and so far four themes have popped up. All of these contribute in their own way to my imagination on how a body and a soft robotics shell could meet and interact in this end-of-life scenario.
Four Approaches to Embodied Support
1. Form and Envelopment
I want to research the process of how a soft robotic system moves between its open breathable states and its closed cocoon-like ones. And the forms that exist somewhere between shelter and presence. The design could combine inflatable textiles with articulated folds and responsive geometries that transform their shape based on user-initiated expansion and retraction and wrapping and loosening actions. The fundamental inquiry of this concept explores whether form could itself provide comfort to people. What would it mean for shape to act as presence rather than decoration?
One biological mechanism that popped up in my research is hagfish slime expansion mechanism. Hagfish create a special silk-like material which transforms into a large mesh-like gel structure when combined with water. The story of this type of shell material could be that it is both strong and flexible, and could form a protective soft envelope that takes only seconds to develop.
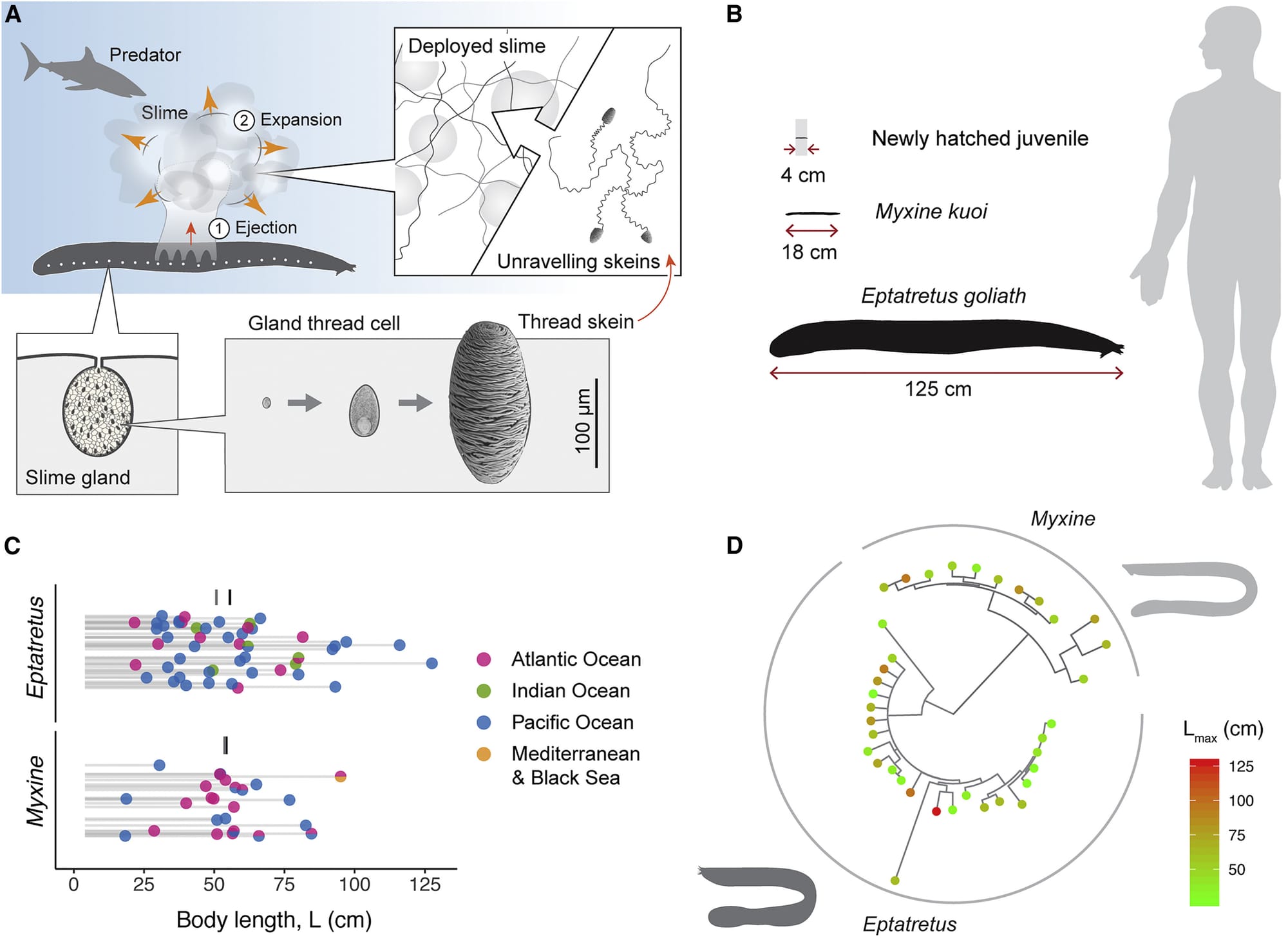
Researchers are looking into the fibrous networks, the hydration-triggered expansion, the rapid morphological shift as models for deployable, lightweight protection systems. But for me, the mechanism of expansion stands out more than protective material properties. And its biological system that's kind of similar to expandable packing foam. A tiny structural trigger that produces a large soft enevelope surrounding objects. This process happens with care while creating a protective breathable "cloud" that envelops the entire body.
The concept of inflation-based soft robotics shares some similarities with hydration-based morphing that could lead to pneumatic responsiveness. The structure provides a flexible and adaptive layer instead of a hard outer shell. Which is exactly the kind of presence through form I'm trying to explore
2. Holding and Support
I am thinking about different systems and approaches which enable people to experience being held while not being constrained. Research on hugging and caregiving ergonomics and palliative comfort exists next to this exploration, but I'll leave the palliative comfort and hug taxonomy for another post. Here I'm looking at variable-stiffness elements, pneumatic chambers, hybrid actuators, and similar solutions that could contribute to my concept.
I'm looking for input that will help me visualize how a nonhuman companion could provide stability without taking over. I'm not looking for how to build this, but to understand why certain forms of holding feel respectful, attentive, or safe. Though I'm not focusing on technology, this theme is as much about dignity as it is about movement.
Following that thought, the octopus keeps coming back to me. The way octopuses wrap their arms and flexible webs around objects or other beings. This movement is fluid and adaptive, the muscular hydrostat system create a structure that allows continuous multi-directional shaping without the need for rigid bones.
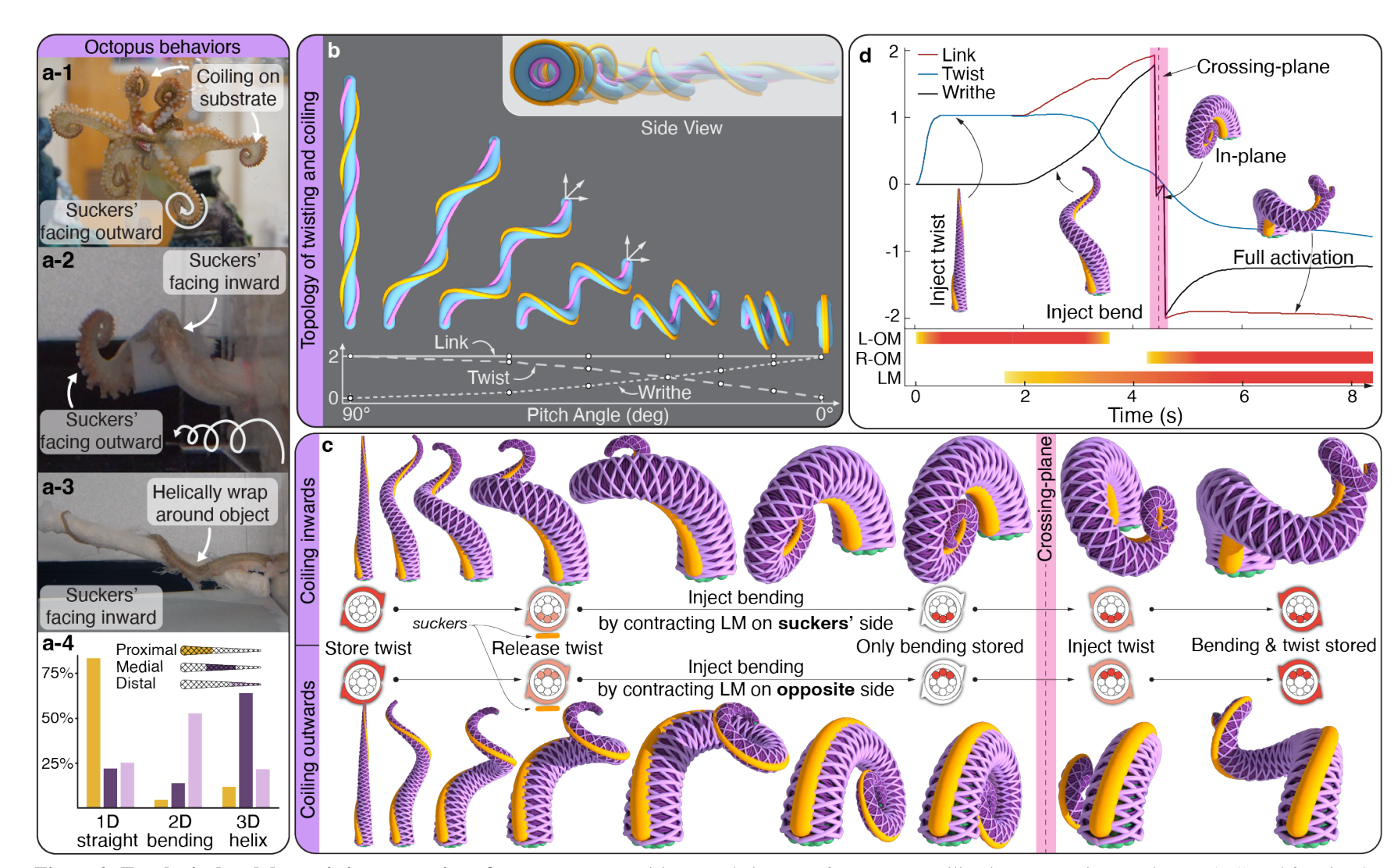
This is nothing new, the connection is well-established in soft robotics research and the octopus arm has been referenced quite a lot precisely because it demonstrates how its continuous deformation and variable stiffness can achieve both delicate manipulation and firm grip without relying on rigid skeletal structures.
What really speaks to me here is the way envelopment creates pressure and form through soft surface articulation. The soft body functions as an open system and protective enclosure through its flexible structure and adapts to the supported object. Like the cloud-shell I imagine.
3. Sensing and Interpretation
It seems important for me not to treat and think about sensors as devices that do "reading" or "measuring", but to look at them as quiet observers. The main focus for me has been on distributed pressure along with micro-movements and breathing patterns and other similar signals. These signals would "talk" with the shell and let it respond with care and not with correction.
What's important is the interpretation of the body and not determining its medical diagnosis. A body moves ever so slightly, breathing stops for a moment, and tension leaves the shoulder. How might a soft shell acknowledge these small gestures and then adjust itself quickly but with calm restraint?
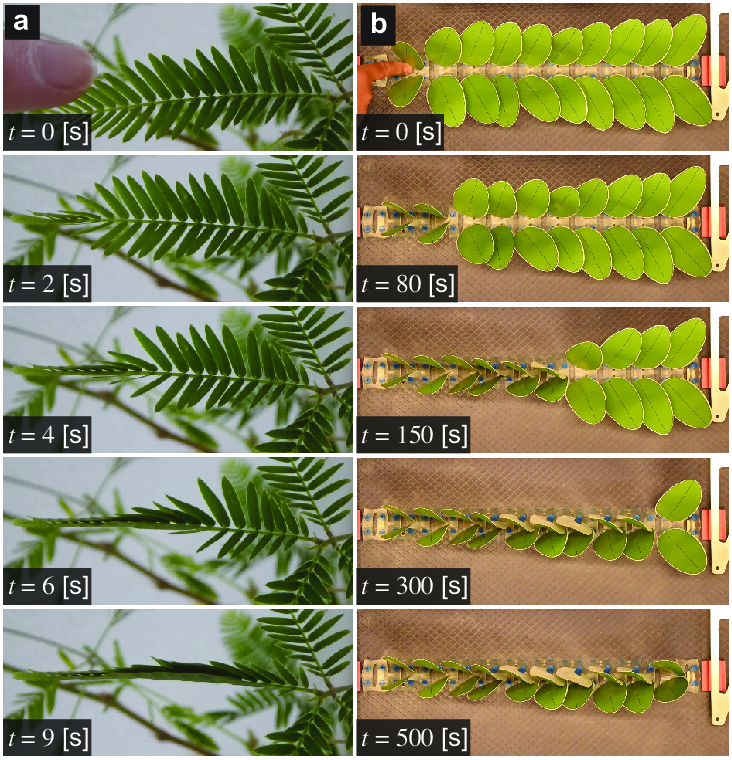
The leaf movement of mimosa pudica when touched led me to think about these points. The plant leaves perform fast folding motions when touched which shows how numerous tiny movements can generate substantial changes in surface area.
Researchers model these kinematics for soft foldable robotics, and what draws me here is the transition between open and enclosed states, this fold-based morphing that resembles what textile-actuated shells might do. It seems to be reversible structural change that doesn't lock into position but remains ready to shift again.
4. Pressures, Temperatures, Volumes, and Textures
This final theme in this initial exploration is about the tactile "vocabulary" of the imagined companion. I imagine the cloud shell using pressure and temperature and volume and texture as its communication methods. These elements feel like the core elements of care. A slow inflation could offer a needed lift and support for the spine and a slow deflation could help reduce back strain when needed.
The shell's texture could express its meaning by changing its firmness and undergoing surface changes that would act like a soft dialogue between the body and the shell. These elements could create a nonverbal grammar of comfort instead of developing another robotic solution.
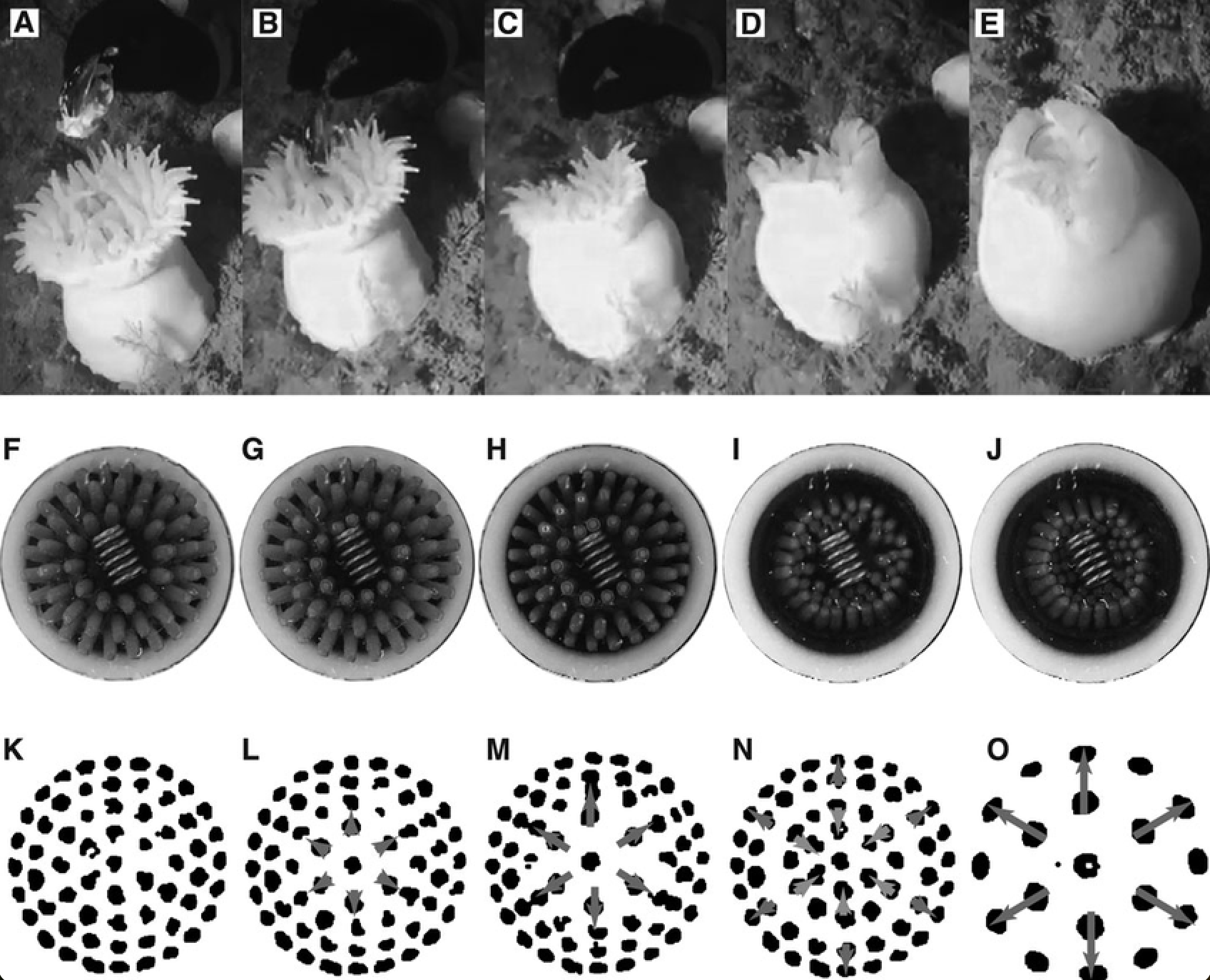
Jellyfish are the ones usually extensively referenced in soft robotics research, but I got mesmerized by another creature. Sea anemones seem to have just that type of contract-and-expand form I'm imagining. They change their shape between flowing open forms and compact spherical closed shapes when they detect touch or environmental changes. It has this soft geometric pattern that moves back and forth between its shapes, it breathes, retreats, and envelopes, like a model of form-as-presence for my concept. Also it seems that the shape transitions are smooth, even gentle, and without any rigid frameworks, just responsive by nature.
Sea cucumbers show another form of this process by changing their protein matrix to change their body stiffness between stiff and soft states at high speed. Their bodies can change through soft reversible processes which I consider the fundamental principle of my research about form adaptation without force application.
All of these organisms share this capacity for gentle, reversible morphological change that feels central to what I'm looking for, a form that responds without force.
I don’t know how these themes will come together. Yet. At the moment I’m letting them just flow and reshape each other. You could say that my work maintains a state of liminality which lets me to just listen and follow its own natural progression.
You can reach out to my assistant, Mikkel Beck: mikkel.o.beck@gmail.com