Kunstlik lähedus ja loomulik kõhedus ehk disain äratundmise ning võõristuse piiril


Tehnoloogia ja inimese suhe on viimastel kümnenditel muutunud üha lähedasemaks ja intiimsemaks. Digitaalsed assistendid vastavad meie küsimustele nii, nagu vestleksime sõbraga; robotid matkivad oskuslikult meie inimlikke emotsioone ja nutiseadmed õpivad tundma meie harjumusi ning eelistusi. Mida enam tehisobjektid ja -süsteemid reaalset inimest meenutavad, seda suurem on võimalus, et kasutajad nendega ka emotsionaalselt suhestuvad.
Edukas äris osatakse seda hästi ära kasutada. Toote või teenuse väärtus praktiliste ülesannete täitmisel (olgu selleks siis põrandapesu, hommikune äratus või suurema haardega otsing küsimustele vastamisel) on kohati juba ebaolulisem kui emotsionaalse sideme loomise võime. Tootest või teenusest saab kaaslane (terminid “assistent” ja “abiline” on elutute objektide kontekstis juba ammu laiatarbekasutuses) ning “talle” hakatakse omistama inimlikke omadusi ning sotsiaalset lähedust.
Ent suured on ka riskid: inimsarnasus loob usaldust ainult teatud piirini, piiri ületamisel hakkab aga kasutajates üha häirivamat ebamugavustunnet tekitama. Kas tegu on pelgalt disainiprobleemi või ka kasutamata potentsiaaliga?
Just siin tuleb mängu antropomorfism kui disainivahend, mis ei mõjuta üksnes vormi ja funktsiooni, vaid ka seda, kuidas me suhestume füüsilise ja digitaalse keskkonnaga ning milliseid emotsionaalseid reaktsioone need esile kutsuvad.
Käesolev analüüs pakub vastuseid küsimustele, kuidas tuttavlikkuse ja võõristuse piiril balansseeriv disain mõjutab inimese suhet tehissüsteemidega ning milliseid võimalusi peidab endas teadlik mängimine emotsionaalsete ja esteetiliste ebamugavustega.
Kõhedustunde oru teooria
Antropomorfism muudab tehisentiteetidega suhtlemise emotsionaalselt siduvamaks, ligitõmbavamaks ja kasutajale tihti ka loomulikumaks. Inimlike joontega tehisobjektid suurendavad kasutajate kaasatust ja usaldust, muutes tooted atraktiivsemaks ning mõjutades seeläbi tarbijate huvi ja ostuotsuseid (Epley, Waytz & Cacioppo, 2007). Ent esineb ka täiesti vastupidist mõju.
(Inim)aju on loodud optimeerima: sellest sõltub meie ellujäämus. Võime kiirelt reageerida eeldab järjepidevuse säilitamist oma mõtetes, hoiakutes ning käitumises. Vastuolude ilmnemisel tekib ajus ebameeldiv kognitiivne dissonants, mille eesmärk on sundida inimest olukorda lahendama - näiteks oma uskumuste või käitumise korrigeerimise teel (Fastinger, 1957).
Ka antropomorfne disain, mis hägustab piiri elusa ja elutu vahel, esitab ebamugava väljakutse meie senistele uskumustele, teadmistele ja käitumisharjumustele. Tehisobjektid, mis tunduvad “peaagu päris” või “liiga päris” olevat ei sobi normaalsuse mustrisse ning mõjuvad häirivalt, valena.

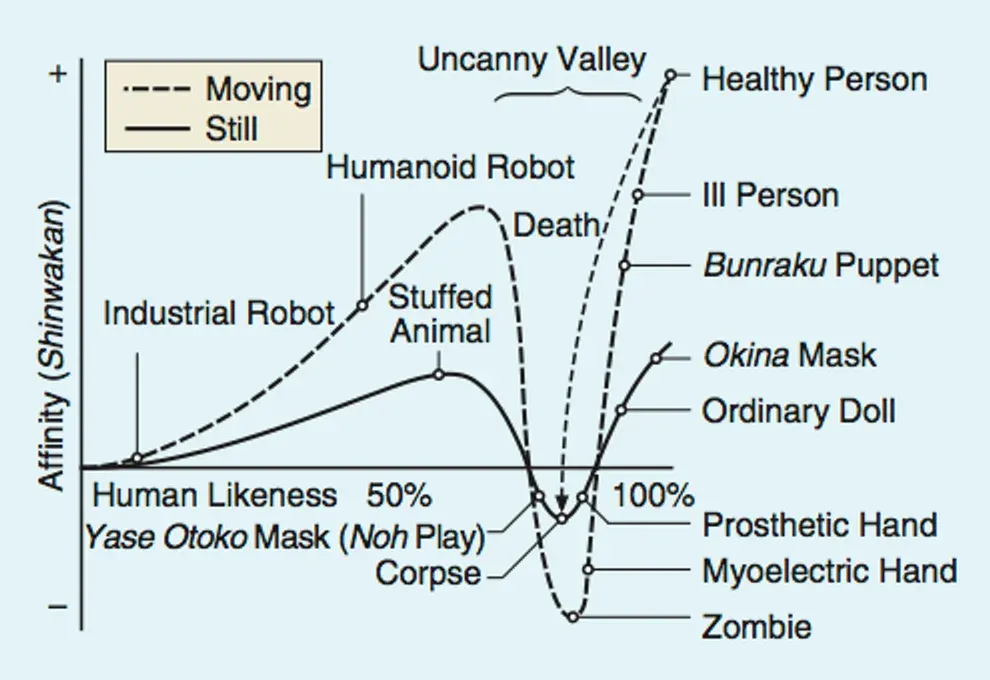
Just sellele tajuprobleemile osutas Masahiro Mori, Jaapani robootik ja insener, kui ta 1970. aastal oma kõhedustunde oru (uncanny valley) teooria avaldas. Tegemist on psühholoogilise fenomeniga, kus hirmu- ja ebamugavussegune kõhedustunne tekib kokkupuutel objektiga, mis on samaaegselt nii “liiga inimlaadne” kui ka “siiski mitte piisavalt inimlaadne”.
Mori väitis, et mida inimlikumaks objekt muutub, seda enam see algselt paelub (mis meeldivuse skaalal kajastub sujuva tõusujoonena). Kui aga hakkavad ilmnema kõrvalekalded ootuspärasest inimlikkusest, ületatakse mugavuspiir ning sümpaatia ja emotsionaalne seotus hakkavad kiiresti vähenema (skaalal tekib langus ehk visuaalne org). (Mori, MacDorman & Kageki, 2012)
Nähtuse mõistmiseks on oluline teada, et reaktsiooni tekkimiseks ei ole vaja eksitamist: kõhedustunne tekib ka siis, kui inimene on teadlik, et vaatleb elutut, ehkki inimlaadset objekti.
Antud protsessis on oluline roll tajulisel ebakõlal. Peaaegu inimlikud, ent pisut ebatäiuslikud näod ja liikumismustrid tekitavad võõristustunnet, sama reaktsiooni aga ei teki täiesti abstraktsete või, vastupidi, ka täiesti realistlike kujutiste puhul. Seda oletust kinnitavad Seyama ja Nagayama (2007) oma uurimuses: just vahepealne inimlikkuse tase on see, mis sageli tugevamaid negatiivseid reaktsioone esile kutsub.
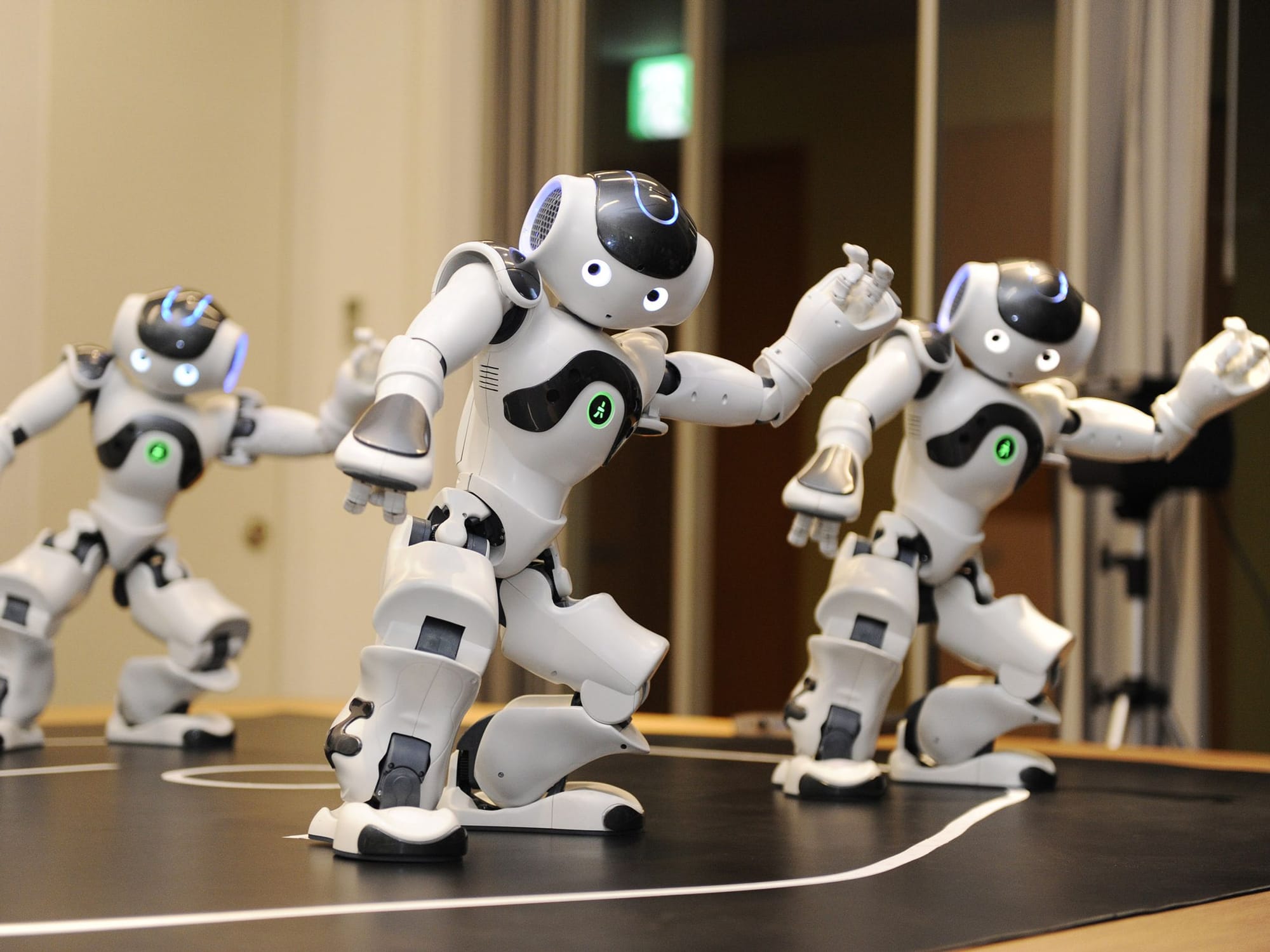
Mori märkis, et igasugune objekti liikumine ainult süvendab negatiivset efekti: just liikudes tulevad esile ka kõige väiksemad ebatäpsused tehislikus inimlikkuses (Mori, MacDorman & Kageki, 2012). Ilmekaks näiteks on humanoidrobotid. Pepper ja NAO on selgelt stiliseeritud ja robotliku välimusega, ega tekita kasutajates erilist võõristust. Seevastu on androidid nagu Erica ja Aria nii hüperrealistlikud, et muudavad kõhedustunde vältimise peaaegu võimatuks (Bartneck, Kanda, Ishiguro & Hagita, 2009).
Sarnaselt õhukest piiri mööda kaasatuse ja võõristuse vahel kõnnivad ka realistlike avataridega juturobotid, mida kasutatakse klienditeeninduses ning isiklike assistentidena. Tinwell, Grimshaw ja Nabi (2015) täheldasid, et väikesed lahknevused kõne sünkroniseerimises või näoilmetes võivad kiiresti lükata kasutaja “kõhedustunde orgu”, vähendades nende rahulolu ja usaldust süsteemi vastu.
Muidugi ei puuduta kõhedustunne ainult roboteid. Efekt laieneb, ehkki väiksemas ulatuses, paljudele virtuaalsetele teenustele, AI-tööriistadele ja pea kõikidele suhtlevatele-suhestuvatele seadmetele.
Argitehnoloogia, millega täna elame, ei olnud aga 1970 aastal veel isegi mitte kujutletav - ning viimaste aastakümnete ülikiire tehnika areng on kaasa toonud vajaduse Mori uncanny valley teooria kohandamiseks ning mitmeteks kaasajastusteks.
Seda on laiendanud näiteks Bartneck jt (2007), kes viitavad oma uurimuses võimalusele, et ‘oru’ asemel oleks ehk korrektsem rääkida ebamugavustunde ‘järsakust’ (uncanny cliff) . Antud täpsustuse aluseks on avastus, et inimlaadsuse suurenemisega seotud meeldivustunne ei pruugi järgida sujuvat kõverat ning ebamugavustundest põhjustatud kukkumine on sageli väga järsk (ja võib mõne tehisidentiteedi puhul sootuks puududa).
Złotowski, Proudfoot, Yogeeswaran, Bartneck (2015) on pakkunud välja, et kõhedustunde org on hoopis dünaamiline nähtus, mida kujundavad konkreetne kontekst, kultuurilised tegurid ja individuaalsed kogemused. See arusaam erineb Mori algsest staatilisest käsitlusest, tuues esile disaini keerukuse mitmekesistes keskkondades.

Schoenherr ja Burleigh teoretiseerivad aga, et kõhedustunde oru fenomen põhineb eelkõige kategoriseerimisprotsessidel ja sageduspõhisel kokkupuutel, mitte ainult kontekstuaalsetel teguritel. Nende uuring näitab, et negatiivsed reaktsioonid tekivad eelkõige tuttavlikkuse puudumisest – võõrast ikka võõristad. (2015) Selle põhjal võime väita, et ehkki kultuurilised tegurid ja sotsiaalsed representatsioonid omavad samuti rolli, on peamiseks mehhanismiks siiski see, kui sageli inimesed teatud stiimulitega kokku puutuvad, sest sellest sõltuvad nii kategoriseerimine kui ka emotsionaalsed reaktsioonid.
Lisaks on kritiseeritud ka algse teooria kehva tõlget, mis on rahvusvahelisel pinnal mitmeid väärarusaamu põhjustanud. Mori kasutatud mõiste "shinwa-kan" tõlgiti esmalt inglise keelde kui "familiarity" (tuttavlikkus), ent hilisemad analüüsid viitavad, et konnotatiivselt täpsem vaste võiks olla "affinity" (tõmme) või "likeability" (meeldimine) (Bartneck jt, 2007). Seega on oht, et taolised ebatäpsused on mõjutanud kogu teooria tõlgendust, kehtivust ja empiirilist tõestust.
Oma ajaloolistest piirangutest hoolimata on aga Mori teooria tänaseni üheks olulisimaks raamistikuks tehisidentiteetide ja interaktsiooni analüüsimisel.
Antropomorfismi potentsiaal
Arusaam antropomorfsete elementide või vihjete rollist kasutajakogemuse kujundamisel on leidnud tuge mitmetest uuringutest. Näiteks rõhutab sotsiaal- ja käitumisteadlane Fogg (2003), et reageerivad ja isikupärastatud süsteemid suurendavad usaldusväärsust, tugevdades kasutajate seotust tehnoloogiaga. Sarnaselt järeldab Breazeal (2002) oma sotsiaalrobotite raamatus, et valmisolek robotiga suhelda ja kaasatus kasvavad, kui robotid jäljendavad inimlikke emotsioone ja sotsiaalseid dünaamikaid.

Miks tervitab meie nutikõlar meid hommikul sõbraliku tervitusega? Miks on robottolmuimejal nimi ja miks kasutajad räägivad oma autodega justkui elusolenditega?
Igapäevast tehnoloogiakasutust vaadates on näha, et mida tuttavam ja “inimlikum” mingi tehnoloogia tundub, seda tõenäolisemalt suhtlevad inimesed sellega sagedamini ja pikema aja vältel. Inimlikud omadused - nagu loomulik suhtlusviis või emotsioonide jäljendamine - aitavad parandada kasutusmugavust ja luua jätkusuutlikke emotsionaalseid sidemeid.
Eduka lahenduse eelduseks on antropomorfismi teadlik juhtimine: kureeritud valikud inimlaadsete elementide kaasamisel ning kasutajate reaktsioonide koordineerimisel. Võõristusest võib sündida senisest rikkalikum kogemus ning sügavamat tajuelamust ja tähenduslikku suhestumist pakkuv teos.
Kujutle, et tuled pärast pikka tööpäeva koju ja lausud väsinult: "Hei, Siri, mängi mulle midagi rahustavat." Hetkega vastab hääl sulle sõbralikult: "Muidugi! Võin mängida Arvo Pärdi Spiegel im Spiegel-it või Chopini Nocturne'i – kumb tundub sulle rahustavam?". Või mõtle hommikule, mil nutikodu ütleb sulle lahkelt: "Tere hommikust! Õues on jahe ja tuuline, võib-olla tahaksid täna hommikul soojemalt riidesse panna?"
Just taolised väikesed ja sõbralikud reaktsioonid muudavad tehnoloogia vähem mehhaaniliseks, annavad sellele peaaegu et inimliku isikupära ning loovad illusiooni suhtlusest. Ometi ei ole “sinu digitaalne assistent” midagi enamat kui kood ja algoritmid, mis su varasemaid eelistusi ja käitumisi analüüsivad ning binaarsesse mustrisse seavad.
Ent: see töötab. Me teame, et tegu on tehnoloogiaga, ja reageerime emotsionaalsel pinnal ikkagi nii, nagu oleks aset leidnud kahepoolne inimlik kontakt.

Epley jt (2007) teooria kohaselt on inimesel loomupärane kalduvus otsida sotsiaalseid seoseid kõigis, nii lihtsates igapäevastes kui ka ebamäärastes või keerukates olukordades. Nass ja Moon (2000) leidsid oma uuringus, et kasutajad reageerivad isegi kõige lihtsamatele tehnoloogiatele automaatselt inimlikult, rakendades näiteks viisakuse ja vastastikuse heatahtlikkuse põhimõtteid, olles täiesti teadlikud, et tegemist on elutu objektiga.
Niisiis on “suhtlus” elutute objektidega sügavalt juurdunud inimlik reaktsioon, ja seega on disainistrateegia puhul kasutajate käitumist suunav psühholoogiline mehhanism ja sellega arvestamine palju enamat kui lihtsalt mõne konkreetse esteetilise või kasutajamugavusest lähtuva valiku langetamine.
Selge on, et inimesed kipuvad rohkem usaldama tehnoloogiat, mis on prognoositav, funktsionaalne, üheselt mõistetav ja situatsiooni sobiv. On valdkondi, kus liigne inimlikkus või ebatäpselt disainitud antropomorfism tekitavad usaldamatust ja suurendavad ohutunnet - näiteks autonoomsete sõidukite käitlemine, kaitsetehnoloogia ja meditsiiniseadmed. Ning on olukordi, kus ka sama valdkonna piires (kasvõi meditsiiniasutuse vastuvõtu- või teraapiarobot või autonoomse sõiduki rentija esmane instrueerimine) on ootused empaatiale ja inimlikule lähenemisele oluliselt kõrgemad.
Design in the military context
Kultuurilised ja situatsioonilised tegurid muudavad antropomorfismi ja kasutajakogemuse seose veelgi mitmetahulisemaks, ja toovad esile vajaduse kohandada disaini konkreetse konteksti jaoks. Baskenti, Hari, ja Lee (2023) näitavad, et kollektivistlikud ühiskonnad on üldiselt vastuvõtlikumad antropomorfsele disainile kui individualistlikud. Spatola ja Chaminade (2021) omakorda leiavad, et kasutajad, kelle kognitiivne koormus on kõrge, antropomorfiseerivad tehnoloogiat suurema tõenäosusega.
Disainerite jaoks tähendab see vajadust arvestada kultuurilise mitmekesisuse ja situatsiooniliste teguritega nii, et loodav lahendus ei saaks liiga lihtsustatud, ega hakkaks samas kasutajaid võõrandama läbi liigse ebamugavustunde tekitamise. Väljakutse - muidugi, aga kas tingimata probleem?
Hanson (2006) toob oma artiklis välja kõhedustunde alahinnatud potentsiaali äratada uudishimu, murda ootuspäraseid suhestumismustreid ja rikastada kasutajakogemust läbi emotsionaalselt mitmekesiste elamuste. Disainerid, kes mõistavad ja oskavad antud nähtust teadlikult kasutada, saavad luua kogemusi, mis poleks ainult mõjusad, vaid ka avardaks meie arusaama suhetest inimlaadsete entiteetidega.
Kõhedus- või ebamugavuse kui disainitööriista kontseptsioon on eriti asjakohane, kui käsitleda visuaalset ebamugavust inimese ja tehisobjekti interaktsioonis, kus mängivad olulist rolli seadme või lahenduse välimus, liikumine, (näo)ilmed või muud silmaga nähtavad elemendid.
Loomulikult kerkivad positiivsega paralleelselt päevakorda ka antropomorfismi ärakasutamise varjuküljed.
Näiteks taoliste lahenduste eetiline pool - usalduse tekitamine läbi teeseldud empaatia, ja kasutajate tunnetega manipuleerimisega seotud riskid. Ning seesama “kõhedustunne” ja meie suutlikkus tasakaalustada inimlaadsete omaduste kasutamist tehnoloogias nii, et negatiivsed emotsioonid oleksid minimeeritud. Ka Kiesler, Powers, Fussell ja Torrey (2008) uuring inimlaadsete elementide mõjust kasutajate interaktsioonidele tõi välja liigsest antropomorfismist põhjustaud umbusalduse ja ärevuse ning tekkivad pinged seoste loomise ja autentsuse säilitamise vahel.
See tähendab, et antropomorfse disaini potentsiaali avamine (et luua tähenduslikke ja emotsionaalselt kõnetavaid interaktsioone) nõuab disainerilt sügavamat teadlikkust ning kõrget kaasatust. Väljakutseteks saavad universaalsete lahenduste ületamine, eetiliste piiride seadistamine ning julgus kasutajate psühholoogilist ja kultuurilist tausta arvestades kontekstipõhiselt läheneda.
Kuidas leida üles piir hea ja halva vahel?
Fink (2012) viitab, et antropomorfse disaini kolm võtmeaspekti – kuju, käitumine ja interaktsioon – on kriitilise tähendusega määramisel, kuidas inimesed tajuvad ja aktsepteerivad roboteid või teisi tehnoloogiaid.

Kui need elemendid on tasakaalus ja vastavad kasutaja ootustele, võib antropomorfism muuta tehnoloogia intuitiivsemaks ja emotsionaalselt kaasavamaks. Ülemäärane või ebaõnnestunud antropomorfism muudab aga, nagu sedastab kõhedustunde oru hüptees, kogemuse võõristavaks.
Sotsiaalrobotite antropomorfismi skaala (Social Robot Anthropomorphism Scale) laiendab antropomorfsete tunnuste haaret veelgi, hõlmates lisaks eelmainitud tunnustele ka emotsionaalseid ja sotsiaalseid käitumismustreid nagu empaatia simuleerimine ja vestlusnormide järgimine. See skaala hõlmab viit mõõdet – välimust, käitumist, tunnetust, emotsioone ja moraalsust, mille abil saab hinnata, kuivõrd inimesed omistavad sotsiaalsetele robotitele inimlikke omadusi. (David, Hayotte, Thérouanne, d'Arripe-Longueville, & Milhabet, 2022)
Taolise laiendatud hindamisraamistiku tulemused näitavad, et kõrgem antropomorfismi tase on seotud suurema kasutajate kaasatuse ja tehnoloogia positiivse omaksvõtuga. Inimlikumaks muudetud roboteid tajutakse meeldivamate ja usaldusväärsematena, mis rõhutab, kui oluline on arvestada disainielementide ja kasutajate psühholoogiliste reaktsioonide vastastikust mõju. (David jt, 2022)
Antropomorfismi mõju ei sõltu ainult tehnoloogia keerukusest või disaini kvaliteedist, vaid ka sellest, kuidas kasutajad seda tajuvad ja millises keskkonnas interaktsioon aset leiab. Kabacińska, Dosso, Vu, Prescott, ja Robillard (2025) täheldasid, et individuaalsed isiksuseomadused, kultuuritaust ja hoiakud kujundavad samuti kasutajate reaktsioone ja inimese-roboti interaktsiooni, viidates sellele, et liialt lihtsustatud suhtlusmudelid võivad piirata disainistrateegiate tõhusust.

Lühidalt öeldes: kontekst loeb.
Suure tähendusega on samuti kasutajate individuaalne tundlikkus. Erinevates olukordades on ootused ja tajutud riskid erinevad, ning selle aspekti alahindamine kiireim viis ebaõnnestuda.
Tehisisiksust disainides on oluline alustada eesmärkide sõnastamisest: kas tegu on tööriista, ametliku infoallika või sotsiaalse suhtluspartneriga?
Isiklikud assistendid nagu Siri, Alexa jt sarnased lahendused on praktilised tööriistad, mille tehisintellekti olemus on selge ja ei tekita kahtlusi. Netipanga kontaktilehelt vestlusaknasse sattunud kasutaja aga ei pruugi ilma selgesõnalise ja nähtava hoiatuseta arugi saada, et peab kirjavahetust masinaga. Pealegi tõstab pidev AI-lahenduste keele sünteesimise võimekuse parandamine nende oskust mitte ainult jutu sisult, vaid ka kõneviisilt “päris inimesele” sarnaneda. Mida usutavamalt suhtleb robot, seda suurem on inimese usaldus ja kaasatus - ent seda kõrgem ka risk ebakõlade tekkides kõhedustunde oru põhja langeda või ebaeetiliselt manipuleeritud saada.
Üheks strateegiaks on antropomorfismi taseme teadlik kohandamine ning läbiva visuaalse, auditiivse ja käitumusliku järjepidevuse säilitamine kõikide “tehissuhtluselementide” puhul. Realismi (kasutaja teab, kus ta on ja kellega suhtleb) ja inimlaadse tehislikkuse (loomulik suhtlusviis, inimlik lähenemine) tasakaalustamine võimaldab disaineritel maksimeerida kasutajakogemust ilma ebamugavustunnet esile kutsumata.
„Discomfort: a New Material for Interaction Design” uuring käsitleb ebamugavustunnet kui võimalust ning pakub välja, et ebamugavustunne võib olla väärtuslik tööriist inimese ja arvuti interaktsioonis. Autorite sõnul on ebamugavus oluline kohanemise eeltingimus, mis võib viia uute oskuste ja seisundite kujunemiseni. Artiklis rõhutatakse, et kasutaja ettevalmistamine ebamugavuseks, sellele järgnev taastumisprotsess ning kogu kogemuse väärtus on võtmetähtsusega aspektid määramaks, kuidas ebamugavustunne mõjutab õppimist ja kohanemist. (Schraefel, Jones, 2021)
Antropomorfismi edukalt kasutavate lahenduste ühiseks omaduseks on, et kasutajal säilib kontroll: ta teab, mis toimub, ning on järgmiseks sammuks valmis.
Kontekstipõhine tonaalsus
Tsiteerides filosoof Ludwig Wittgensteini: “Sõna tähendus on selle kasutamises keeles” (2009). Emotsionaalne sidusus ja väärtus on kontekstist lahutamatud nähtused.
Inimlaadsete robotite ja digitaalsete assistentide aktsepteeritavus sõltub suuresti sellest, kuivõrd need suudavad sulanduda oma kasutuskonteksti ning millisel viisil väljendavad oma "iseloomu" (Forlizzi & DiSalvo, 2006). Näiteks aitab karikatuursete maskottide kasutamine luua turvalist ja ligipääsetavat keskkonda ning toetab vabamat suhtlust; soodustab stressivaba tehnoloogia kasutamist, paremat õppimist ning vähendab ärevust, eriti haridus- ja meelelahutusvaldkonnas.
Maskotistatud disainilahendused kasutavad ära tuttavlikkuse ja sotsiaalse kaasatuse psühholoogilisi eeliseid, millele viitavad ka Epley, jt. oma uurimustöös (2007). Aga - see kehtib vaid madala panusega ning mängulises kontekstis. Olukordades, mis nõuavad kõrgemat autoriteeti - näiteks meditsiiniandmete käitlus, õigusdokumentide haldus, finantsteenused jms - oleks sama lahendus ebapiisav, või suisa usaldusväärsust ohustav.
Ka neutraalsetes keskkondades - näiteks autonoomne klienditeenindusrobet lennujaamas - on oluline tabada õiget tooni. Sõbralikud, ehkki professionaalseks jäävad soovitused aitavad muuta kogemuse meeldivamakas ja sujuvamaks, ning toetavad illusiooni efektiivsusest. Kui sama robot hakkaks ootamatult naljatlema või kasutaks liigemotsionaalseid väljendeid, tunduks see kohatu ning pakutud abi vähemväärtuslik, ehk isegi ebamugav vastu võtta.
Fink (2012) kinnitas, et ehkki “näojooned” mõjutavad robotite inimlikkuse tajumist, peab disain sobima roboti võimete ja eesmärgiga. Eduka roboti disaini võti seisneb robotlike omaduste, inimlike elementide ja praktilisuse tasakaalus, arvestades kultuurilisi erinevusi ja individuaalseid eelistusi.
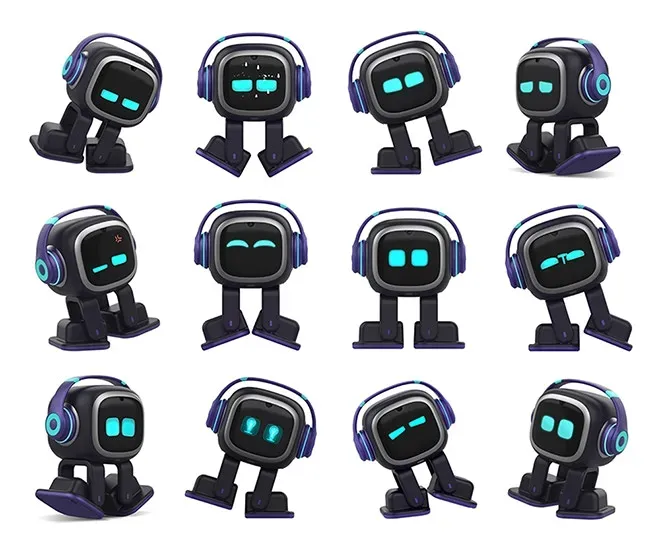
EMO is a desktop AI robot designed to serve as an expressive, pet-like companion. While it doesn't aim to replicate human behavior entirely, EMO exhibits human-like reactions and expressive "eyes" that foster a sense of companionship.
Antropomorfsete liideste täpsest tonaalsest doseerimisest pakuvad head võrdlusmaterjali kaks sarnast humanoidrobotit: teadus- ja kliendisuhtluseks mõeldud SoftBank’i Pepper ning hariduskeskkonda loodud NAO. Mõlemad on disainilt voolujoonelised ning lapsepõlvest tuttava roboti kujuga, sõbraliku näoga ning selgelt mängulised; füüsilised erisused hakkavad mängima detailides. NAO ilme on uudishimulik, kujult meenutab see interaktiivseid õppimisvahendeid, liigesed ja mehhanismid on nähtaval ning liikumine mitmekesine - andes NAO’le teadus- ja robootikaõppe konteksti sobiva robotliku esteetika. Pepperi puhul on põhirõhk suhtlusel: klienditeenindusel ja informatsiooni edastamisel, mitte aga füüsilisel lahendusel. Lihtsustatud, isegi amorfse keha kontrastiks on suur pea, väljendusrikkad silmad ning tagasihoidlik naeratus. See disainivalik muudab Pepperi ligitõmbavamaks ja tehnoloogiliselt vähem hirmutavaks, aidates kaasa sujuvamale suhtlusele ja kasutajate kaasamisele nii, et fookus oleks just suhtlusel ja mitte füüsilisel interaktsioonil.
Kõrge panusega kontekstides - nagu näiteks autonoomsed sõidukid - on antropomorfsete liideste õige tonaalsuse leidmine veelgi keerulisem. Turvalisuse seisukohast on ülioluline, et kavatsuste edastamine toimuks üheseltmõistetavalt, ning tavalahendustes töötavad emotsionaalse sideme loomiseks mõeldud elemendid osutuvad kohati takistavateks. Nagu leidis Hancock jt, võivad halvasti teostatud antropomorfsed omadused hoopis õõnestada süsteemi usaldusväärsust, eriti kriitilistes olukordades. Usaldus mõjutab otseselt seda, kuivõrd inimesed järgivad roboti antud soovitusi ebakindlas keskkonnas. Samas tuvastati, et liigne usaldus võib viia liigse sõltuvuse ja süsteemi väärkasutuseni, ehk mõlemad äärmused vähendavad tugevalt süsteemi tõhustust. See on eriti oluline sõjalistes olukordades, kus robotite kasutamine sõltub otseselt kasutajate usaldusest. (2011)
Samas leidub ka valdkondi, kus tehnoloogia eesmärk on täita spetsiifilisi vajadusi, mitte luua usaldust läbi tuttavlikkuse. Paradoksaalsel kombel on üheks selliseks valdkonnaks seksitehnoloogia. Näiteks intiimrobotite puhul näib, et eesmärk pole mitte võimalikult täpse inimsarnasuse saavutamine, vaid eelistustepõhiste sensuaalsete ja emotsionaalsete kogemuste pakkumine. Seksitehnoloogia on loodud ennekõike toetama individuaalseid elamusi, mitte imiteerima täiuslikku inimlikkust, kinnitas ka Locatelli uuring. Artikkel demonstreerib, kuidas erinevad seksitehnoloogia vormid keskenduvad tähenduslike personaalsete kogemuste loomisele, pakkudes kohandatavaid isiksusi, personaalseid emotsionaalseid sidemeid ning arvestades kasutaja eelistuste arengut ajas. Analüüs rõhutab, et eesmärk pole inimestevaheliste suhete või inimsarnasuse täiuslik jäljendamine, vaid hoopis uute intiimsuse vormide loomine ja individuaalsete, tähendusrikaste ühenduste võimaldamine. (2022) Seega, kuna kasutajad ei otsi sellistelt seadmetelt mitte turvalisust ja ennustatavust vaid rahuldust ja isiklikku naudingut, ei pea need ka läbima samu usaldusfiltreid, eriti kaitse- või meditsiinitehnoloogiaga võrreldes.
Niisiis: mida kõrgemad on panused, seda olulisem on antropomorfismi teadlik doseerimine, läbipaistvusele ja töökindlale funktsonaalsusele panustamine ning tasakaalu leidmine emotsionaalse kaasatuse ja operatiivse selguse vahel.
Kuhu edasi?
Tänased disainerid on valiku ees: kas jätkata antropomorfismi turvalistes piirides või teadlikult mängida kõhedustunde ja võõristuse piiril, et pakkuda kaasavamaid ja provokatiivsemaid kogemusi? Või - sukeldudagi sinna ülepeakaela sisse?
Inimlaadsed tehnoloogiad, alates juturobotidest kuni humanoidrobotiteni, peavad tasakaalustama realismi ja abstraktsiooni, et vältida soovimatut võõristust. Kasutajakogemuse seisukohalt on võtmetähtsusega järjepidevus: kui visuaalne, auditiivne ja käitumuslik esitus on omavahel kooskõlas, võib antropomorfism tugevdada usaldust ja seotust.
Kõhedustunde esteetika võib aga teadliku valikuna olla ka provokatiivne tööriist kaasaegses kunstis ja avangardses disainis, kus ootuspäraste tajumustrite murdmine loob uusi tähendusvälju.
Immeasurable Thirst by Tobias Bradford
Ent kõhedustunde oruga manipuleerimine jääb alati disaineritelt hoolikat kaalutlust nõudma, eriti kultuurilisi ja eetilisi tegureid arvestades. Disain, mis ühes kontekstis mõjub uuenduslikuna, võib teises tekitada tugevat vastumeelsust, ning oht liikuda efektiivsest kommunikatsioonist kasutajate manipuleerimiseni on eriti suur just edukalt toimivate lahenduste puhul
Nii et ehk ei olegi küsimus selles, kas kõhedustunde orgu vätida või mitte, vaid - KUIDAS ja MILLAL seda teadlikult rakendada. Kui disainerid õpivad mõtestatult kasutama tuttavlikkuse ja võõristuse piiri, avab see uusi võimalusi interaktsioonide, esteetika ja emotsionaalse kaasatuse kujundamisel. Kõhedustunde oru mõistmine ja selle strateegiline kasutamine võib viia disainipraktikani, mis ei ole üksnes funktsionaalne ja kasutajasõbralik, vaid ka intellektuaalselt ja emotsionaalselt kõnetav.
Eduka disaini võti, nagu ikka, peitub iga konkreetse kasutusjuhtumi jaoks sobiva tasakaalu leidmises ning järjepideva, soovitud kasutajakogemust toetava disaini loomises. See eeldab, et psühholoogilised ja tehnilised aspektid oleks piisava põhjalikkusega uuritud ja läbi mõeldud. Inimese ja tehnoloogia vahelise interaktsiooni kujundamine ei tohiks seega käia “puusalt” ja “olemasoleva teadmise” pealt: oluline on võtta aega teemasse süvenemiseks, eesmärkide täpseks sõnastamiseks ning valitud lahenduste valideerimiseks.
Kontekstitundlik disain ja kõhedustunde org
Antropomorfismi tase peab olema kooskõlas tehnoloogia eesmärgi ja kasutuskontekstiga.Kõrge riskitasemega valdkondades (nt meditsiin, õigusteenused, finantssektor, kaitsesektor) tuleb usaldusväärsuse säilitamiseks kasutada konservatiivsemaid antropomorfseid tunnuseid.Mängulised, sotsiaalsed või hariduslikud keskkonnad võimaldavad kasutada aga oluliselt ilmsemaid antropomorfseid elemente.
Olulised disainipõhimõtted:
- Taga järjepidevus visuaalsete, auditiivsete ja käitumuslike elementide vahel.
- Keskendu funktsionaalsele töökindlusele ja läbipaistvusele, eriti veel tundliku iseloomuga rakendustes.
- Anna kasutajale võimalus olla olukorra peremees: ta peab teadma, kus asub, kellega suhtleb ja mida järgmiseks oodata
- Eralda konteksti analüüsimiseks aega! Kaardista, planeeri ja testi oma hüpoteese.
- Hinda jooksvalt iga elemendi ja sammu ohutuskriitilisust: mida kõrgemad on panused, seda suuremat ohtu kujutab endast liigse antropomorfismi kasutamine
Usalduse tagamise eeldused:
- Kommunikatsioon peab olema selge ja vastama süsteemi eesmärgile
- Tasakaalusta inimlaadseid elemente tehislikega: sa ei soovi eksitada!
- Järjepidevus ja läbipaistvus ennekõike: kasutaja peab suutma ette näha süsteemi käitumist
- Loo asjakohaseid emotsionaalseid seoseid, nendega liialdamata
- Ära unusta kultuurilisi ja demograafilisi aspekte, mis võivad mõjutada lahenduse tõlgendamist!
Füüsiline disain:
- Füüsiliste objektide puhul tasakaalusta mehaaniline funktsionaalsus konteksti sobiva ligipääsetava esteetikaga.
- Arvesta liikumismustritega, mis ei käivita kõhedustunde oru reaktsiooni.
- Säilita ühtne disainikeel kõigis füüsilistes komponentides.
- Arvesta keskkonnatingimuste ja situatsiooniliste vajadustega.
- Rakenda erineva formaalsuse tasemeid vastavalt kontekstile.
Kokkuvõtvalt - eesmärk ei ole üksnes funktsionaalsus, vaid ka intellektuaalselt ja emotsionaalselt kaasav disain.
Allikad
Bartneck, C., Kanda, T., Ishiguro, H., & Hagita, N. (2007). My robotic doppelgänger—A critical look at the uncanny valley. Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 269–276. https://doi.org/10.1109/ROMAN.2009.5326351
Bartneck, C., Kanda, T., Ishiguro, H., & Hagita, N. (2007). Is the uncanny valley an uncanny cliff? RO-MAN 2007 – The 16th IEEE International Symposium on Robot and Human Interactive Communication, 368–373. https://doi.org/10.1109/ROMAN.2007.4415111
Breazeal, C. L. (2002). Designing sociable robots. MIT Press.
David, D., Hayotte, M., Thérouanne, P., d'Arripe-Longueville, F., & Milhabet, I. (2022). Development and validation of a social robot anthropomorphism scale (SRA) in a french sample. International Journal of Human-Computer Studies, 162, 102802 https://doi.org/10.1016/j.ijhcs.2022.102802
Epley, N., Waytz, A., & Cacioppo, J. T. (2007). On seeing human: A three-factor theory of anthropomorphism. Psychological Review, 114(4), 864–886. https://doi.org/10.1037/0033-295X.114.4.864
Fastinger, Leon. (1957). A theory of cognitive dissonance. Stanford University Press.
Fink, Julia. (2012). Anthropomorphism and Human Likeness in the Design of Robots and Human-Robot Interaction. In Proceedings of the 4th International Conference on Social Robotics. 7621. 199-208. http://dx.doi.org/10.1007/978-3-642-34103-8_20
Fogg, B. J. (2003). Persuasive technology: Using computers to change what we think and do. Morgan Kaufmann Publishers.
Forlizzi, J., & DiSalvo, C. (2006). Service robots in the domestic environment: A study of the Roomba vacuum in the home. Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, 258–265. https://doi.org/10.1145/1121241.1121286
Hancock, P. A., Billings, D. R., Schaefer, K. E., Chen, J. Y. C., de Visser, E. J., & Parasuraman, R. (2011). A meta-analysis of factors affecting trust in human-robot interaction. Human Factors: The Journal of the Human Factors and Ergonomics Society, 53(5), 517–527. https://doi.org/10.1177/0018720811417254
Hanson, D. (2006). Exploring the aesthetic range for humanoid robots. The University of Texas at Dallas.
Kabacińska, K., Dosso, J. A., Vu, K., Prescott, T. J., & Robillard, J. M. (2025). Influence of user personality traits and attitudes on interactions with social robots: Systematic review. Collabra: Psychology, 11(1), Article 129175. https://doi.org/10.1525/collabra.129175
Kiesler, S., Powers, A., Fussell, S. R., & Torrey, C. (2008). Anthropomorphic interactions with a robot and robot-like agent. Social Cognition, 26(2), 169-181. https://doi.org/10.1521/soco.2008.26.2.169
Locatelli, C. (2022). Rethinking 'sex robots': Gender, desire, and embodiment in posthuman sextech. Journal of Digital Social Research, 4(3), 10–33. https://doi.org/10.33621/jdsr.v4i3.87
Mori, M., MacDorman, K. F., & Kageki, N. (2012). The uncanny valley [From the field]. IEEE Robotics & Automation Magazine, 19(2), 98–100. https://doi.org/10.1109/MRA.2012.2192811
Nass, C., & Moon, Y. (2000). Machines and mindlessness: Social responses to computers. Journal of Social Issues, 56(1), 81–103. https://doi.org/10.1111/0022-4537.00153
Schoenherr, J. R., & Burleigh, T. (2015). Uncanny sociocultural categories. Frontiers in Psychology, 5, Article 1456. https://doi.org/10.3389/fpsyg.2014.01456
Schraefel, m. c., & Jones, M. (2023). Discomfort: a new material for interaction design. Frontiers in Computer Science, 5, 958776. https://doi.org/10.3389/fcomp.2023.958776
Seyama, J., & Nagayama, R. S. (2007). The uncanny valley: Effect of realism on the impression of artificial human faces. Presence: Teleoperators and Virtual Environments, 16(4), 337–351. https://doi.org/10.1162/pres.16.4.337
Spatola, Nicolas & Chaminade, Thierry. (2021). Cognitive load increases anthropomorphism of humanoid robot. The automatic path of anthropomorphism. https://doi.org/10.31234/osf.io/kd4ge
Złotowski, J., Proudfoot, D., Yogeeswaran, K., & Bartneck, C. (2015). Anthropomorphism: Opportunities and challenges in human–robot interaction. International Journal of Social Robotics, 7(3), 347–360. https://doi.org/10.1007/s12369-014-0267-6
Tinwell, A., Grimshaw, M., & Abdel Nabi, D. (2015). The Effect of Onset Asynchrony in Audio Visual Speech and the Uncanny Valley in Virtual Characters. International Journal of Mechanisms and Robotic Systems, 2(2), 97-110. https://doi.org/10.1504/IJMRS.2015.068991
Wittgenstein, L. (2009). Philosophical investigations. United Kingdom: Wiley-Blackwell.